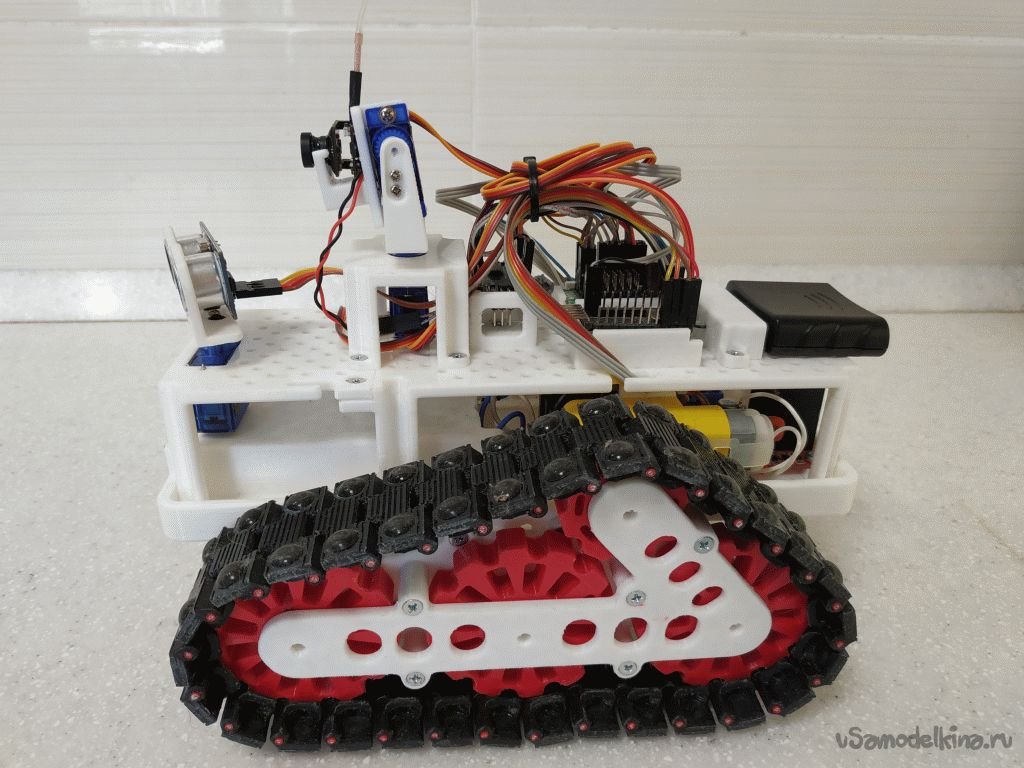
Гусеницы танка, сделанные своими руками, обеспечивают отличное сцепление с дорогой
Максимальное расстояние, которое робот может пройти по трубопроводу, является второй наиболее важной характеристикой робототехнических систем телеинспекции. Максимальное расстояние определяется длиной кабеля и силой тяги робота вкупе с удельным весом кабеля так как при той же силе тяги робот с тонким и легким кабелем может пройти большее расстояние, чем робот с тяжелым кабелем. Сила тяги робота напрямую зависит от веса робота.








Как сделать робота на ROS своими руками. Часть 1: шасси и бортовая электроника
Менеджер очень среднего звена. Поиск Написать публикацию. Golf Robotics Производство роботов для сбора мячей для гольфа. Время на прочтение 3 мин. Мы задумываемся о разработке робота-охранника периметра c использованием софта, который мы разработали для нашего робота для сбора мячей для гольфа.


![[Hot Item] Робот для малых шасси (резиновая гусеница шириной )](https://supereyes.ru/upload/resize_cache/webp/upload/iblock/c46/c4691823ba3517098a03f161dc594ba2.webp)




.jpg)
В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System. Это будет наш первый мобильный робот со своей операционной системой и первый опыт работы с ROS. Далее мы постараемся пошагово и как можно подробнее рассказать вам о процессе проектирования, конструирования и программирования робота, а также расскажем, с каким трудностями и проблемами мы столкнулись. Если вы сомневаетесь, что вам это подходит, повторите проект попроще, например робота для езды по линии. Создание свеого робота — это не самая сложная, но и не тривиальная задача.